
”kitti 数据集“ 的搜索结果
Kitti数据集很庞大,包含了双目、光流、场景流、深度、里程计、目标、跟踪、马路、语义、原始数据等大类别,每个大类别又包含很多的细分的序列。类别详情官网解释的很清楚。比如我想下载自动驾驶的里程计数据集...
KITTI自动驾驶数据集.zip
标签: 数据集
KITTI自动驾驶数据集.zip
详解KITTI数据集 一、KITTI数据集发布方 2011年,Andreas Geiger(KIT)、Philip Lenz(KIT)、Raquel Urtasun(TTIC)三位年轻人发现,阻碍视觉感知系统在自动驾驶领域应用的主要原因之一,是缺乏合适的benchmark。...
KITTY数据集是一个用于自动驾驶和计算机视觉研究的常用数据集。它由德国卡尔斯鲁厄理工学院和丰田美国技术研究所联合创建,并以"KITTI Vision Benchmark Suite"的形式进行发布。 KITTY数据集包含在城市环境下采集的...
Kitti数据集下载-附件资源

KITTI数据集简析
标签: 自动驾驶

KITTI数据集解读
标签: 自动驾驶


KITTI数据集介绍
标签: 目标检测
参考这两篇就够了: https://blog.csdn.net/weixin_43753850/article/details/125620900 https://blog.csdn.net/qq_44173974/article/details/127705156
kitti数据集下载
标签: 大数据
kitti

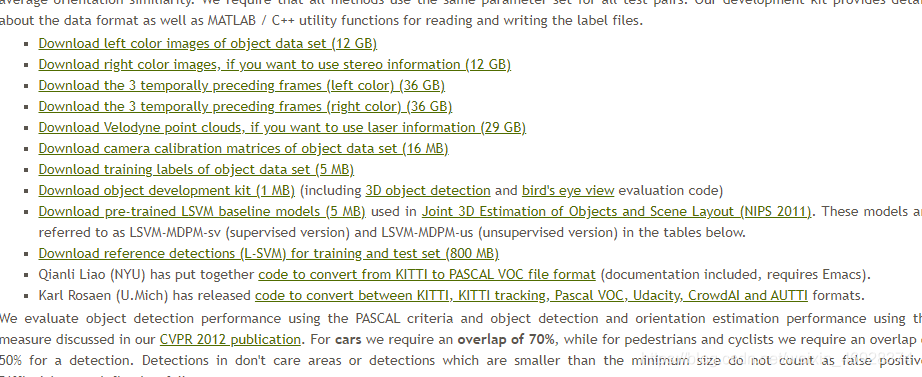
点击下载:https://s3.eu-central-1.amazonaws.com/avg-kitti/data_object_velodyne.zip。:点击下载:https://s3.eu-central-1.amazonaws.com/avg-kitti/data_object_image_2.zip。:点击下载:...
解决KITTI数据集中,数据集下载,整理数据集,解压报错,数据集转换过程中,mmcv安装报错,运行版本兼容性问题


首先新建KITTI文件夹,在新建的KITTI文件夹新建01文件夹,将下载好的2011_10_03_drive_0042_sync.zip数据集解压到01文件夹下。2.前期准备,文件夹的放置(这里以序列号01,2011_10_03_drive_0042_sync.zip数据集举例...

waymo数据集总结
标签: 自动驾驶

用于kitti数据集的LeGO-LOAM 该存储库包含LeGO-LOAM的修改后的代码,可通过kitti数据集运行和评估。 运行代码时,您将以KITTI地面格式获取LeGO-LOAM的轨迹结果,并且可以通过EVO-eval套件使用KITTI地面真实结果直接...
kitti数据pose
标签: kitti
kitti数据pose data .
KITTI数据集的数据采集平台装配有2个灰度摄像机,2个彩色摄像机,一个Velodyne 64线3D激光雷达,4个光学镜头,以及1个GPS导航系统。11个具有真实轨迹的序列(00-10)用于训练,11个没有真实的序列(11-21)用于评估...

KITTY数据集网址 官网:http://www.cvlibs.net/datasets/kitti/eval_object.php?obj_benchmark=2d 国内下载地址:http://dataset.f3322.net:666/share/kitti/ 参考博客:...
2.点云下载:点击下载:https://s3.eu-central-1.amazonaws.com/avg-kitti/data_object_velodyne.zip。3.标签下载:点击下载:https://s3.eu-central-1.amazonaws.com/avg-kitti/data_object_label_2.zip。...
链接:https://pan.baidu.com/s/1iTTHjE-8zJIQx9ZzNvlkEw?左侧相机拍摄 彩色 7481张 KITTI格式标签。
推荐文章
- 1N5819-ASEMI轴向肖特基二极管1N5819-程序员宅基地
- 把maven的setting配置文件改为需要jdk版本_<profile> <id>jdk-1.4</id> <activation> <jdk>1.4</-程序员宅基地
- 使用matlab进行DBscan聚类_dbscan聚类分析图用什么软件-程序员宅基地
- 探秘技术新星:BBS_admin - 一个现代化的论坛后台管理系统-程序员宅基地
- 【译】JavaScript 开发者年度调查报告-程序员宅基地
- 神仙级渗透测试入门教程(非常详细),从零基础入门到精通,从看这篇开始!_网络渗透技术自学-程序员宅基地
- 多个protocbuf版本切换_protobuf调整版本-程序员宅基地
- msf+cobaltstrike联动(一):把msf的session发给cobaltstrike-程序员宅基地
- C语言--编写程序,输入一个整数,判断它能否被3,5,7整除_编程序实现功能:输入一个整数,判断其是否能同时被3、5、7整除。能被整除则输出“y-程序员宅基地
- 数据技术之Hadoop(HFDS文件系统)-程序员宅基地